
1. はじめに:手術支援ロボットとは
手術支援ロボット(Surgical Robotic Systems)は、外科医の操作を精密に再現し、より高度な手術を実現するために開発されたシステムです。市場をリードするda Vinci(ダビンチ)をはじめ、国産のhinotori(ヒノトリ)、Hugo(ヒューゴ)など、多様なシステムが普及しています。
この技術の普及は、小さな切開部から手術を行う低侵襲性と、拡大された3D高精細画像のもとで、人間の手の可動域を超える精密な操作を実現する機能によるものです。患者さんの身体的負担を大幅に軽減し、手術の確実性を向上させる革新的な技術として、世界的に急速に導入が進んでいます。

2. システムの基本構成と仕組み
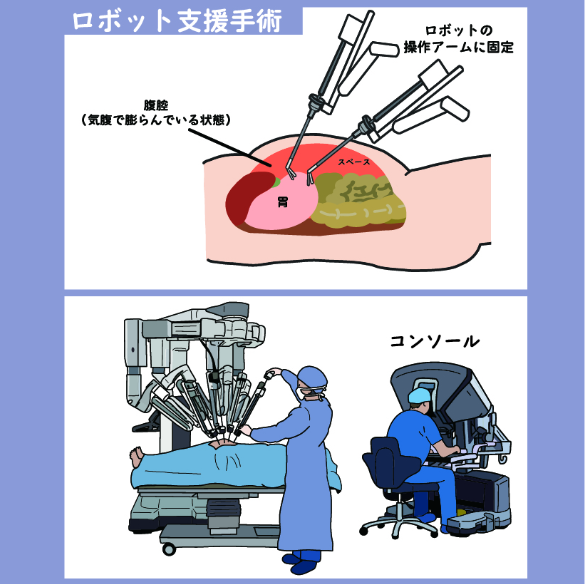
手術支援ロボットシステムは、機能と役割に応じて、主に以下の3つのコンポーネントで構成されています。
2.1. サージョンコンソール (Surgeon Console)
術者(外科医)が座って操作を行うコックピットです。高精細な3D画像を覗き込み、手元のマスターコントローラーを操作することで、遠隔でロボットアームを制御します。術者の手の自然な手ぶれを自動で補正する機能も備えており、精密な動作を可能にします。

2.2. ペイシェントカート(Patient Cart / ロボットアーム)
患者の傍らに設置され、実際に手術を実行するロボットアーム群です。アームには内視鏡(カメラ)や、鉗子・メスなどの手術器具(Surgical Tool/Instrument)が装着されます。専用器具の先端は多関節(リスト構造)を備え、人の手首を上回る広い可動域と自由度を実現しています。

2.3. ビジョンカート(Vision Cart)
手術中の画像処理と表示、およびシステム全体の制御を担うユニットです。高精細な術野の画像を、手術室内の他のスタッフと共有する役割も持ちます。

3. ロボット支援手術の主なメリットと実現機能
ロボット支援手術は、以下の機能により、術者と患者双方に大きなメリットをもたらします。
- 高精細な視認性(3D High-Definition Imaging):
- コンソールに映し出される術野は、肉眼の10~15倍に拡大された立体的な3D画像であり、血管や神経などの微細構造の識別を容易にし、周囲組織を温存した安全性の高い手術に貢献します。
- 精度の高い操作性(Precision and Dexterity):
- 手ぶれ補正機能に加え、多関節(リスト構造)を持つ専用鉗子により、人の手首よりもはるかに広い可動域と自由度を実現します。これにより、狭い空間でも繊細かつ複雑な動作を確実に行うことができます。
- 人間工学的な負担軽減(Ergonomics):
- 術者は座った姿勢で操作できるため、長時間におよぶ手術での肉体的・精神的な疲労が軽減され、集中力の維持に役立ちます。
4. 既存システムにおける主要な課題:技術背景が指摘する問題点
多くのメリットがある一方で、既存のロボットシステムには、操作上の技術的な課題が残されています。
A. 術者の操作負担と再方向付けの問題
主要な問題の一つは、手術中に必要な手動による器具の再方向付け(Re-orientation)の必要性です。
- 回避動作の負担: 器具がツールパス(経路)に沿って移動する際、障害物や敏感な領域(血管、神経など)に接近すると、術者は即座に衝突回避のため器具の向きを手動で変更しなければなりません。
- エルゴノミクス(人間工学)の維持: 経路が湾曲している場合など、術者が快適な手首の位置(comfortable wrist positioning)を保つため、器具の向きを繰り返し調整する必要が生じます。
この手動かつ繰り返しの調整は、術者の手や腕の疲労、手術の遅延、そして器具が動いている最中の操作によるヒューマンエラーのリスクを高める原因となります。
技術開発の焦点:操作負担の自動化
この課題を解決するため、技術開発は「術者による手動介入の最小化」を目指しています。
- 例えば、US10426560B2(ツールパスに沿って移動する手術器具の向きを再調整するためのロボットシステム)などの特許では、ロボットシステムを半自律モードで動作させ、ツールパスに沿った器具の向きを自動で再調整する技術が開発されています。
- また、WO2019164533A1などの自動経路計画アルゴリズムに関する技術は、術者が回避操作を必要としない「衝突のない最適な経路」をロボットが事前に計算・実行するための基盤を築いています。
B. その他の技術的・運用上の課題
- 触覚・力覚フィードバックの欠如:
- 多くのシステムで、器具先端の触覚や押さえる力(Force/Tactile Feedback)が術者に伝わらず、組織の損傷リスクにつながる可能性があります。US20180049792A1(感知されたパラメータに基づく手術器具の位置決め)などの技術は、組織のひずみや変位量を感知し、それに基づいて器具の動作を制御・抑制することで、安全性を高めることを目指しています。
- 高額な導入・維持コスト:
- システム本体や消耗品が高額である点も、広範な普及における大きな障壁です。
5. まとめと今後の展望
現在の技術開発の方向性は、「手動による繰り返し再方向付け」に伴う操作負担と、それに起因するヒューマンエラーのリスクを軽減し、手術の効率と安全性を向上させるという明確な目標に基づいています。
特許技術に見られるように、ツールの半自律制御やセンサーに基づく安全機能の統合は進んでいます。今後は、さらにAIを活用した経路計画の完全自動化やリアルタイムの触覚フィードバックの実現が進むことで、手術支援ロボットシステムはより洗練されたものへと進化することが期待されます。
【主な参考文献】
A. 一般情報・構成・メリットに関するもの
- インテュイティブ: da Vinci | ダビンチ|ロボットサージカルシステム 製品情報.
- メディカロイド: hinotori手術支援ロボット 製品情報.
- 日本ロボット外科学会: ロボット支援手術に関する各種解説記事.
- 東京医科大学病院、新百合ヶ丘総合病院など各種医療機関: ロボット支援手術の概要や機能に関する公開情報.
- J-Stage(日本内視鏡外科学会雑誌など): ロボット支援手術の利点、問題点、今後の動向に関する論文.
B. 技術的課題・解決策(特許背景)に関するもの
- US10426560B2: Robotic system and method for reorienting a surgical instrument moving along a tool path(ツール向きの半自律調整技術)
- US20180049792A1: Surgical Tool Positioning Based on Sensed Parameters(センサーによる組織保護制御技術)
- WO2019164533A1: Surgical Robot System and Method of Controlling the Same(自動経路計画に関する技術)
- 専門分野の論文: 外科医の疲労(Fatigue)やヒューマンエラー、力覚フィードバックの欠如に関する研究論文(例:PMC掲載の外科医エルゴノミクスに関する記事など)。





